Introduction
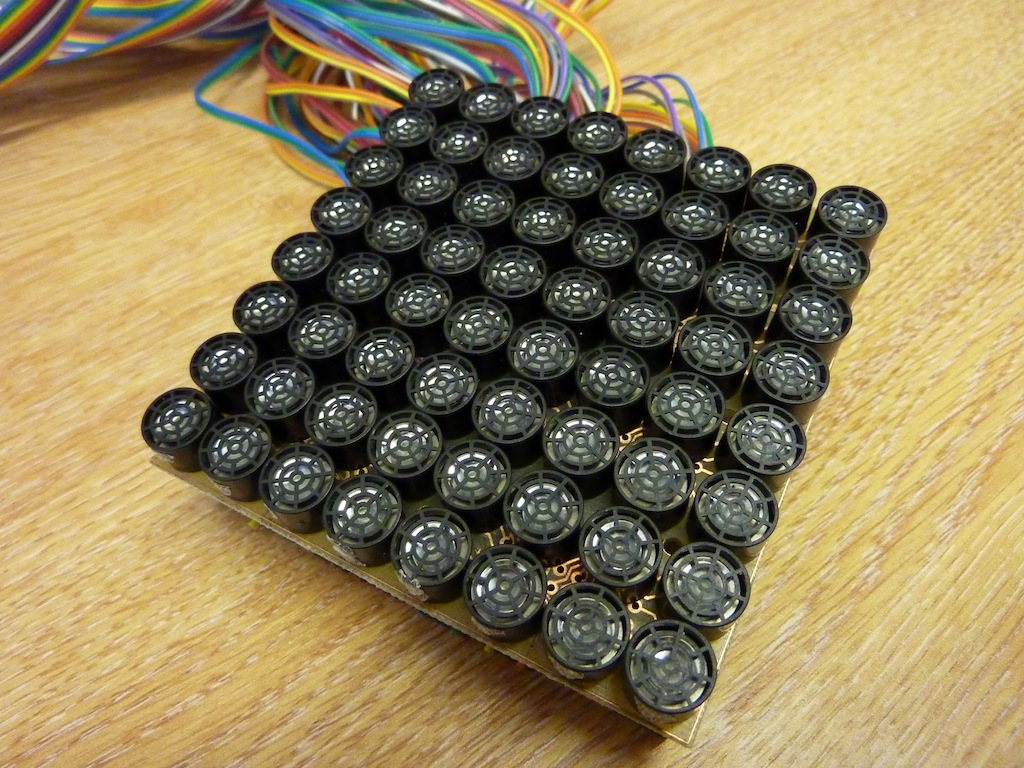
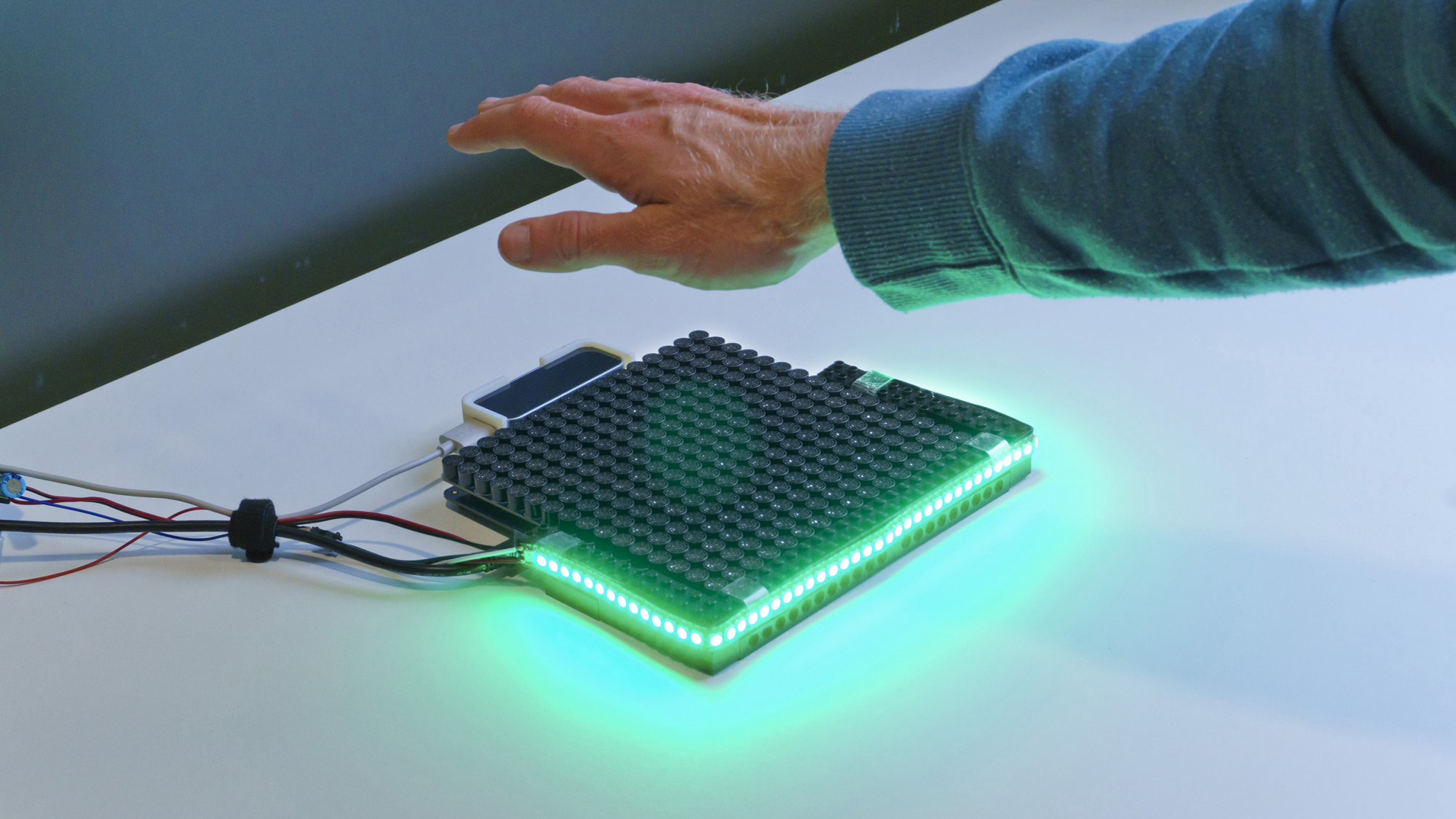
Ultrasound haptic technology creates mid-air haptic sensations using focused ultrasound waves, so that people can experience haptic feedback against the hands without any physical contact with a device. There are numerous benefits of this technology, especially for touchless user interface design. To keep this introduction short, I recommend reading our recent survey paper of this technology [1] if you want more details about the technology and its applications.
I have been involved in the ultrasound haptics community for a long time (since 2012) and have sporadically done research in this area. On this page, I give a brief overview of some of my research into ultrasound haptics.
Perception
One of my research interests is the perception of ultrasound haptic sensations. Since this is an emerging haptic technology, we still only have a basic understanding of how its tactile sensations are perceived by the body. In addition to this, it is so radically different from existing haptic technologies (e.g., vibrotactile) that little existing knowledge can be transferred. Research is needed to better understand the relationships between rendering characteristics and perception, so that we can make the most of the technology.
Research highlights:
Applications
One promising application for ultrasound haptic technology is in giving feedback for touchless mid-air gesture interaction. Touchless gestures have great potential but their adoption has been hampered by numerous usability issues [4]. Ultrasound haptic feedback can potentially help to alleviate these issues. A key benefit of this technology is that interaction feedback can be spatially coupled with the user’s input actions: in other words, haptic feedback can be given directly to the user’s hands whilst they gesture.
My work has explored various ways of integrating ultrasound haptic feedback in touchless user interface design, including using ultrasound haptic feedback to help users find a good hand position for touchless interaction [5] and giving confirmatory feedback about input gestures [6].
Research highlights:
- Ultrasound haptics for hand guidance [5]
- Ultrasound haptics for touchless input feedback [6]
- Ultrasound haptic textures for virtual objects [7]
Miscellaneous
Research highlights:
References
[1] A Survey of Mid-Air Ultrasound Haptics and Its Applications
I. Rakkolainen, E. Freeman, A. Sand, R. Raisamo, and S. Brewster.
IEEE Transactions on Haptics, vol. 14, pp. 2-19, 2020.
@article{ToHSurvey,
author = {Rakkolainen, Ismo and Freeman, Euan and Sand, Antti and Raisamo, Roope and Brewster, Stephen},
title = {{A Survey of Mid-Air Ultrasound Haptics and Its Applications}},
year = {2020},
publisher = {IEEE},
journal = {IEEE Transactions on Haptics},
volume = {14},
issue = {1},
pages = {2--19},
pdf = {http://research.euanfreeman.co.uk/papers/IEEE_ToH_2020.pdf},
doi = {10.1109/TOH.2020.3018754},
url = {https://ieeexplore.ieee.org/document/9174896},
issn = {2329-4051},
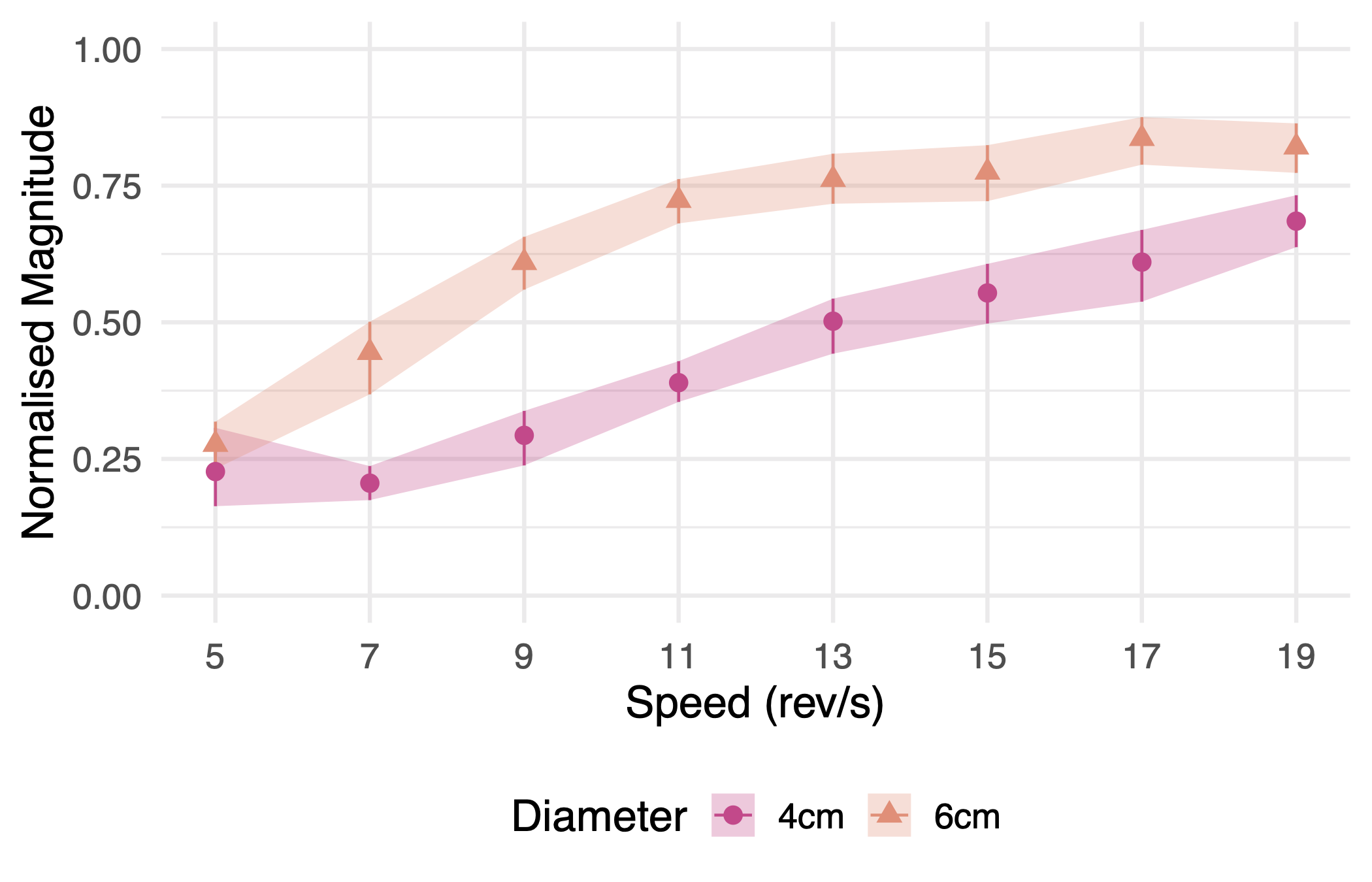
}[2] Perception of Ultrasound Haptic Focal Point Motion
E. Freeman and G. Wilson.
In Proceedings of 23rd ACM International Conference on Multimodal Interaction – ICMI ’21, 697-701. 2021.
@inproceedings{ICMI2021Motion,
author = {Freeman, Euan and Wilson, Graham},
booktitle = {{Proceedings of 23rd ACM International Conference on Multimodal Interaction - ICMI '21}},
title = {{Perception of Ultrasound Haptic Focal Point Motion}},
year = {2021},
publisher = {ACM},
pages = {697--701},
doi = {10.1145/3462244.3479950},
url = {http://euanfreeman.co.uk/perception-of-ultrasound-haptic-focal-point-motion/},
pdf = {http://research.euanfreeman.co.uk/papers/ICMI_2021_Motion.pdf},
data = {https://zenodo.org/record/5142587},
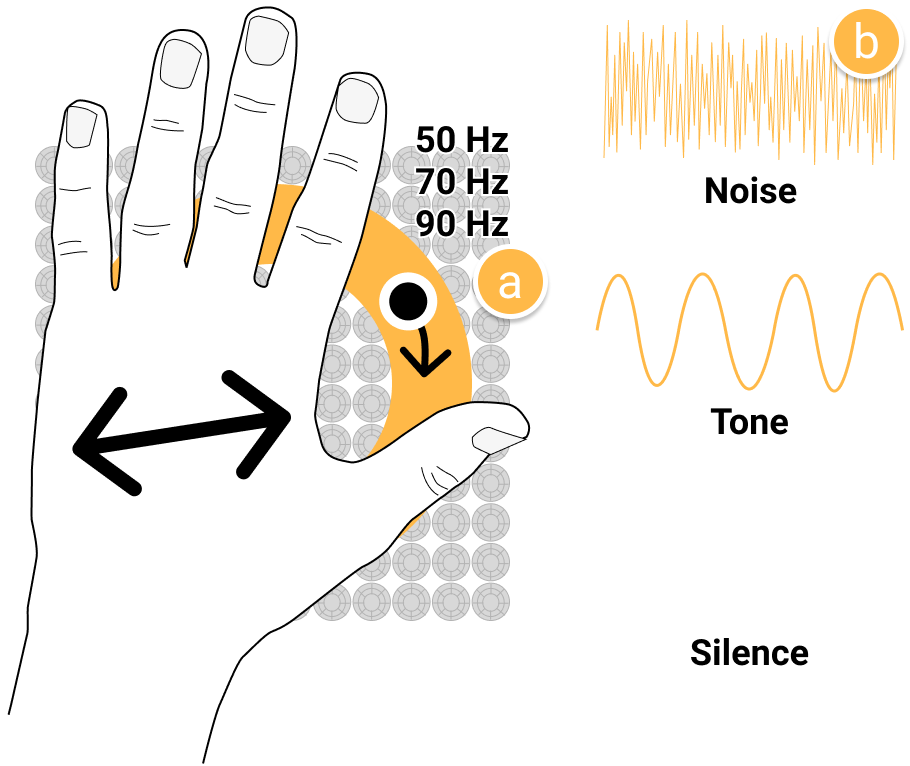
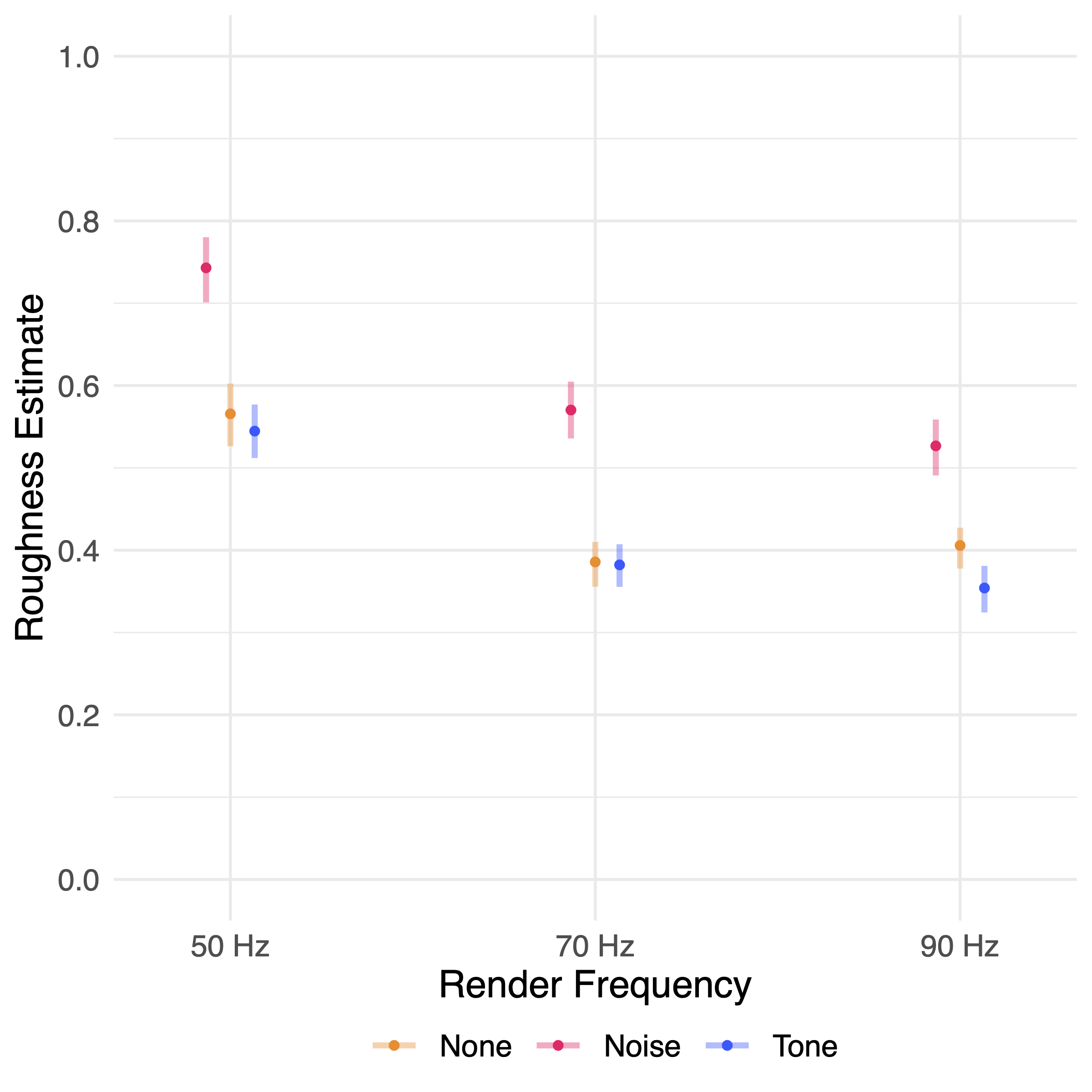
}[3] Enhancing Ultrasound Haptics with Parametric Audio Effects
E. Freeman.
In Proceedings of 23rd ACM International Conference on Multimodal Interaction – ICMI ’21, 692-696. 2021.
@inproceedings{ICMI2021AudioHaptic,
author = {Freeman, Euan},
booktitle = {{Proceedings of 23rd ACM International Conference on Multimodal Interaction - ICMI '21}},
title = {{Enhancing Ultrasound Haptics with Parametric Audio Effects}},
year = {2021},
publisher = {ACM},
pages = {692--696},
doi = {10.1145/3462244.3479951},
url = {http://euanfreeman.co.uk/enhancing-ultrasound-haptics-with-parametric-audio-effects/},
pdf = {http://research.euanfreeman.co.uk/papers/ICMI_2021_AudioHaptic.pdf},
data = {https://zenodo.org/record/5144878},
}[4] Do That, There: An Interaction Technique for Addressing In-Air Gesture Systems
E. Freeman, S. Brewster, and V. Lantz.
In Proceedings of the 34th Annual ACM Conference on Human Factors in Computing Systems – CHI ’16, 2319-2331. 2016.
@inproceedings{CHI2016,
author = {Freeman, Euan and Brewster, Stephen and Lantz, Vuokko},
booktitle = {{Proceedings of the 34th Annual ACM Conference on Human Factors in Computing Systems - CHI '16}},
title = {{Do That, There: An Interaction Technique for Addressing In-Air Gesture Systems}},
year = {2016},
publisher = {ACM},
pages = {2319--2331},
doi = {10.1145/2858036.2858308},
pdf = {http://research.euanfreeman.co.uk/papers/CHI_2016.pdf},
url = {http://euanfreeman.co.uk/gestures/},
video = {{https://www.youtube.com/watch?v=6_hGbI_SdQ4}},
}[5] HaptiGlow: Helping Users Position their Hands for Better Mid-Air Gestures and Ultrasound Haptic Feedback
E. Freeman, D. Vo, and S. Brewster.
In Proceedings of IEEE World Haptics Conference 2019, the 8th Joint Eurohaptics Conference and the IEEE Haptics Symposium, TP2A.09. 2019.
@inproceedings{WHC2019,
author = {Freeman, Euan and Vo, Dong-Bach and Brewster, Stephen},
booktitle = {{Proceedings of IEEE World Haptics Conference 2019, the 8th Joint Eurohaptics Conference and the IEEE Haptics Symposium}},
title = {{HaptiGlow: Helping Users Position their Hands for Better Mid-Air Gestures and Ultrasound Haptic Feedback}},
year = {2019},
publisher = {IEEE},
pages = {TP2A.09},
doi = {10.1109/WHC.2019.8816092},
url = {http://euanfreeman.co.uk/haptiglow/},
pdf = {http://research.euanfreeman.co.uk/papers/WHC_2019.pdf},
data = {https://zenodo.org/record/2631398},
video = {https://www.youtube.com/watch?v=hXCH-xBgnig},
}[6] Tactile Feedback for Above-Device Gesture Interfaces: Adding Touch to Touchless Interactions
E. Freeman, S. Brewster, and V. Lantz.
In Proceedings of the International Conference on Multimodal Interaction – ICMI ’14, 419-426. 2014.
@inproceedings{ICMI2014,
author = {Freeman, Euan and Brewster, Stephen and Lantz, Vuokko},
booktitle = {Proceedings of the International Conference on Multimodal Interaction - ICMI '14},
pages = {419--426},
publisher = {ACM},
title = {{Tactile Feedback for Above-Device Gesture Interfaces: Adding Touch to Touchless Interactions}},
pdf = {http://research.euanfreeman.co.uk/papers/ICMI_2014.pdf},
doi = {10.1145/2663204.2663280},
year = {2014},
url = {http://euanfreeman.co.uk/projects/above-device-tactile-feedback/},
video = {{https://www.youtube.com/watch?v=K1TdnNBUFoc}},
}[7] Textured Surfaces for Ultrasound Haptic Displays
E. Freeman, R. Anderson, J. Williamson, G. Wilson, and S. Brewster.
In Proceedings of 19th ACM International Conference on Multimodal Interaction – ICMI ’17 Demos, 491-492. 2017.
@inproceedings{ICMI2017Demo,
author = {Freeman, Euan and Anderson, Ross and Williamson, Julie and Wilson, Graham and Brewster, Stephen},
booktitle = {{Proceedings of 19th ACM International Conference on Multimodal Interaction - ICMI '17 Demos}},
title = {{Textured Surfaces for Ultrasound Haptic Displays}},
year = {2017},
publisher = {ACM},
pages = {491-492},
doi = {10.1145/3136755.3143020},
url = {},
pdf = {http://research.euanfreeman.co.uk/papers/ICMI_2017_Demo.pdf},
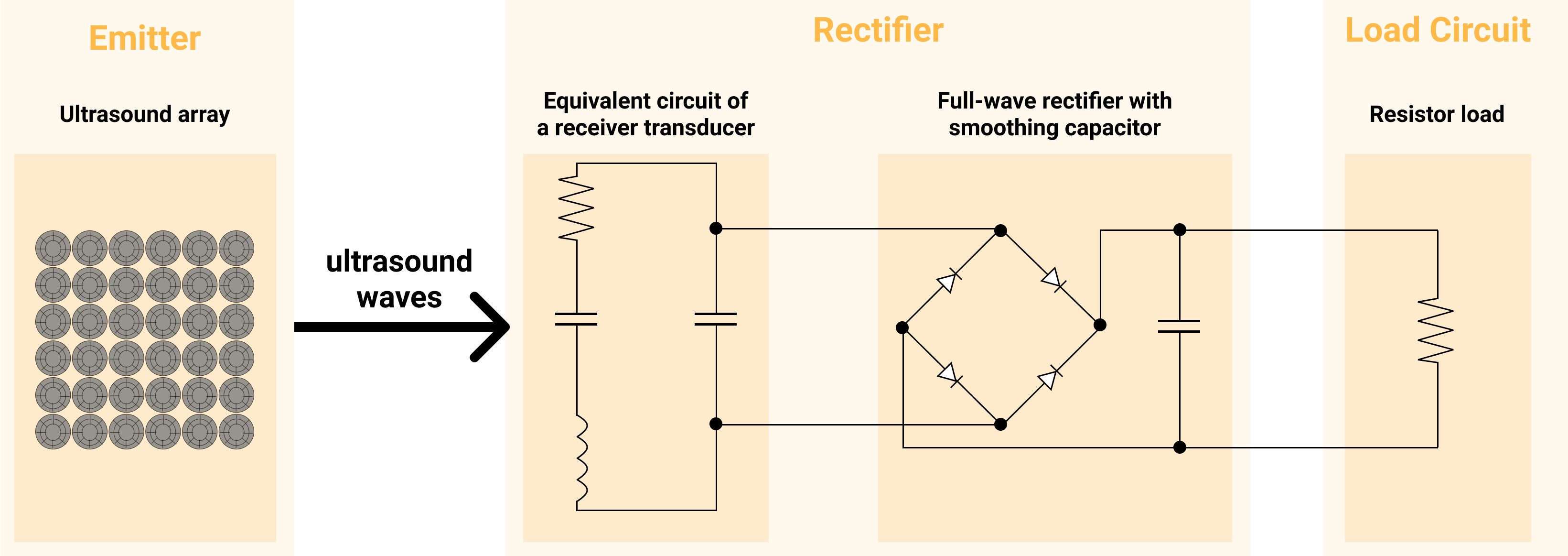
}[8] UltraPower: Powering Tangible & Wearable Devices with Focused Ultrasound
R. Morales Gonzalez, A. Marzo, E. Freeman, W. Frier, and O. Georgiou.
In Proceedings of the Fifteenth International Conference on Tangible, Embedded, and Embodied Interaction – TEI ’21, Article 1. 2021.
@inproceedings{TEI2021,
author = {Morales Gonzalez, Rafael and Marzo, Asier and Freeman, Euan and Frier, William and Georgiou, Orestis},
booktitle = {{Proceedings of the Fifteenth International Conference on Tangible, Embedded, and Embodied Interaction - TEI '21}},
title = {{UltraPower: Powering Tangible & Wearable Devices with Focused Ultrasound}},
year = {2021},
publisher = {ACM},
pages = {Article 1},
doi = {10.1145/3430524.3440620},
pdf = {http://research.euanfreeman.co.uk/papers/TEI_2021.pdf},
url = {http://euanfreeman.co.uk/ultrapower-powering-tangible-wearable-devices-with-focused-ultrasound/},
}