In recent projects I’ve been using Pure Data for generating Earcons and Tactons; I’ve written more about generating Tactons with Pure Data here. I’m sharing these here in the hope that they’ll be useful to someone – if you use or adapt them, I’d be very interested to hear what cool things you’re doing with them!
Everything is on github: https://github.com/efreeman/pd-earcons-tactons
Tactons for Selection Gestures

Source here. This patch generates the tactile feedback I used in the above-device tactile feedback project. Feedback was generated in Pure Data using commands sent over a TCP socket (localhost:34567; change port number in network-listener sub-patch). Looking into the network-listener patch shows the message protocol:
- y: Enable output
- z: Disable output
- on: Currently does nothing (unused outlet)
- off: Stops all output in progress
- ramp_a: Ramp amplitude from 0 to 1, at 150 Hz over 1000 ms
- ramp_a_exp: As above, with exponential increase rather than linear
- ramp_f: Ramp frequency from 0 to 150 Hz over 1000 ms
- ramp_rough: Modulate a 150 Hz wave with a wave whose frequency changes from 0 Hz to 75 Hz over 1000 ms
- const: Produce a 150 Hz wave for 1000 ms
- pulse: Produce a 150 Hz wave for 200 ms
We used 150 Hz for all sine waves as this was the resonant frequency of our actuator; change values as needed. Duration can be altered from 1000 ms too.
This is essentially a dumb patch which generates sound on demand. It’s easier to have greater control over feedback in a more expressive programming language. Using sockets is a nice low-cost way of communicating between Pure Data and other applications.
Single Tone Generator
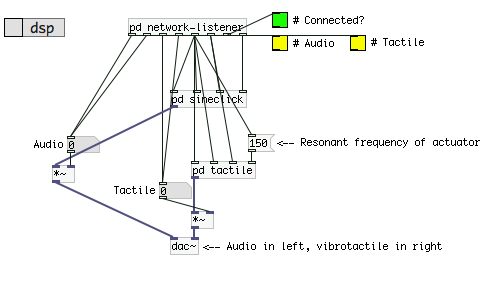
Source here. This patch generates an enveloped tone using parameters sent over a socket. As in my other patches, the TCP socket is on localhost port 34567; this can be changed in the network-listener sub-patch. Here I’ve used the left and right channel for different types of tone: audio in the left, vibrotactile in the right. The right channel is at a fixed frequency to drive an actuator, whereas the left channel can vary tone frequency. Audio and tactile feedback can be enabled/disabled on demand. Message protocol:
- a0: Audio off
- a1: Audio on
- t0: Tactile off
- t1: Tactile on
- <attack> <decay> <freq>: Enveloped tone
Tone generation uses three parameters: attack time (in ms), decay time (in ms) and oscillating frequency (in Hz). Attack time specifies how long the tone takes to reach full amplitude. Decay time specifies how long the tone takes to return to zero amplitude. The tone is also sustained at full amplitude for the decay duration. Frequency specifies the audio frequency but not the tactile frequency, which is fixed.
As an example, “100 500 440” produces a 1100 ms-long tone at 440 Hz; it takes 100 ms to reach full amplitude, is sustained for 500 ms and then returns to zero amplitude after a further 500 ms. If you wish to further specify the sustain time, change the arguments passed into vline~ in the sineclick sub-patch.
This can be used to create a wide variety of sound effects with corresponding tactile patterns. Short envelope times result in “click” sounds, whereas longer envelope times result in much softer tones. Generate rhythmic patterns using more expressive programming environments, as trying to do this dynamically in pure data would be cumbersome.